
Hello! My name is Guillaume Sartoretti, and I was a Postdoctoral Fellow in the Robotics Institute at Carnegie Mellon University. My research focuses on the distributed/decentralized coordination of numerous agents, at the interface between conventional control and artificial intelligence. Applications range from multi-robot systems, where independent robots need to coordinate their actions to achieve a common goal, to high-DoF articulated robots, where joints need to be carefully coupled during locomotion in rough terrain.
I have started my new faculty position at the National University of Singapore. This website will no longer be updated, but you can find information about this new chapter of my career on my
News
-
April 30, 2019
RSS 2019 - Paper Accepted
A paper I collaborated on has been accepted for oral presentation at RSS 2019 (June 22-26th, Freiburg im Brisgau, Germany):
Read more » -
April 25, 2019
Faculty position offer accepted at NUS!
I will join the Department of Mechanical Engineering at the National University of Singapore (NUS) as a Tenure Track Assistant Professor this July.
Read more » -
February 05, 2019
RAL 2018 - Paper Accepted and preprint available on arXiv
Our paper summarizing my recent work on distributed reinforcement and imitation learning applied to multi-agent path finding has been accepted for publication in IEEE Robotics and Automation Letters (RA-L)! The pre-print of this paper is (and will remain) available on arXiv:
Read more » -
January 25, 2019
ICRA 2019 - Two Papers accepted for interactive presentation at ICRA 2019 (Montreal, Canada)
I have 2 papers accepted for interactive presentation at ICRA 2019 (May 20-24th, Montreal, Canada):
Read more » -
January 20, 2019
TRO 2018 - Paper conditionally accepted and available on arXiv
I have submitted a paper summarizing my recent work on distributed reinforcement learning applied to mobile articulated robots (snake, hexapod) to IEEE Transactions in Robotics (T-RO), which has been conditionally accepted for publication in January 2019. The pre-print of this paper is available on arXiv:
Read more »
Current Research Projects
Inertial-stabilized CPG with full SE(3) body pose control for locomotion, climbing, and payload balancing in extreme terrains
Joint-Space inertial CPG with full SE(3) body pose control for locomotion, climbing, and payload balancing on stairs, steep inclines, unstructured terrain, etc.
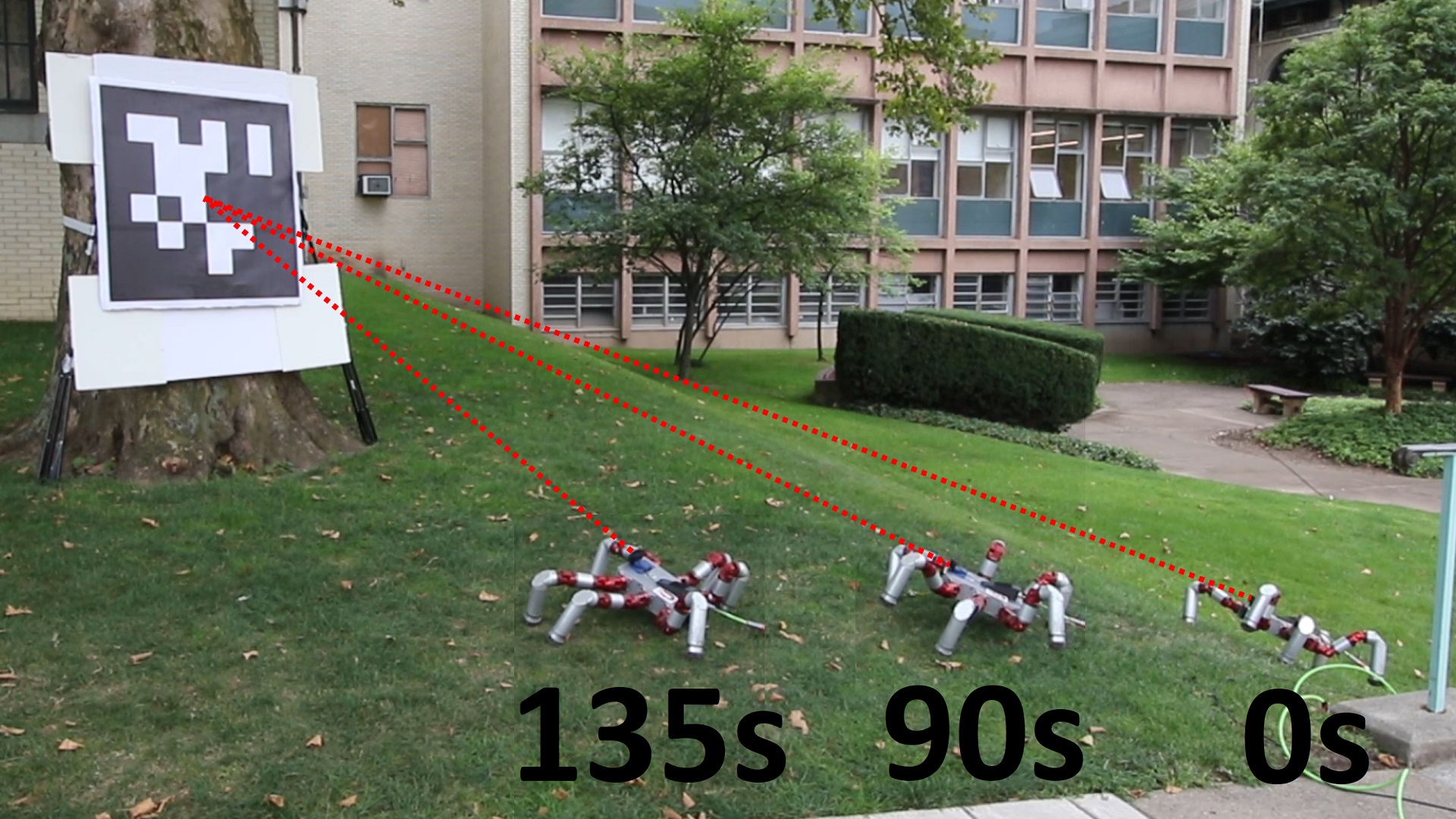
Task-space CPG for composed motions on a hexapod robot (and visual navigation)
Task-Space Central Pattern Generator for a legged robot (hexapod) locomoting while carrying a fixed camera, where gaze control and locomotion must be controlled independently.
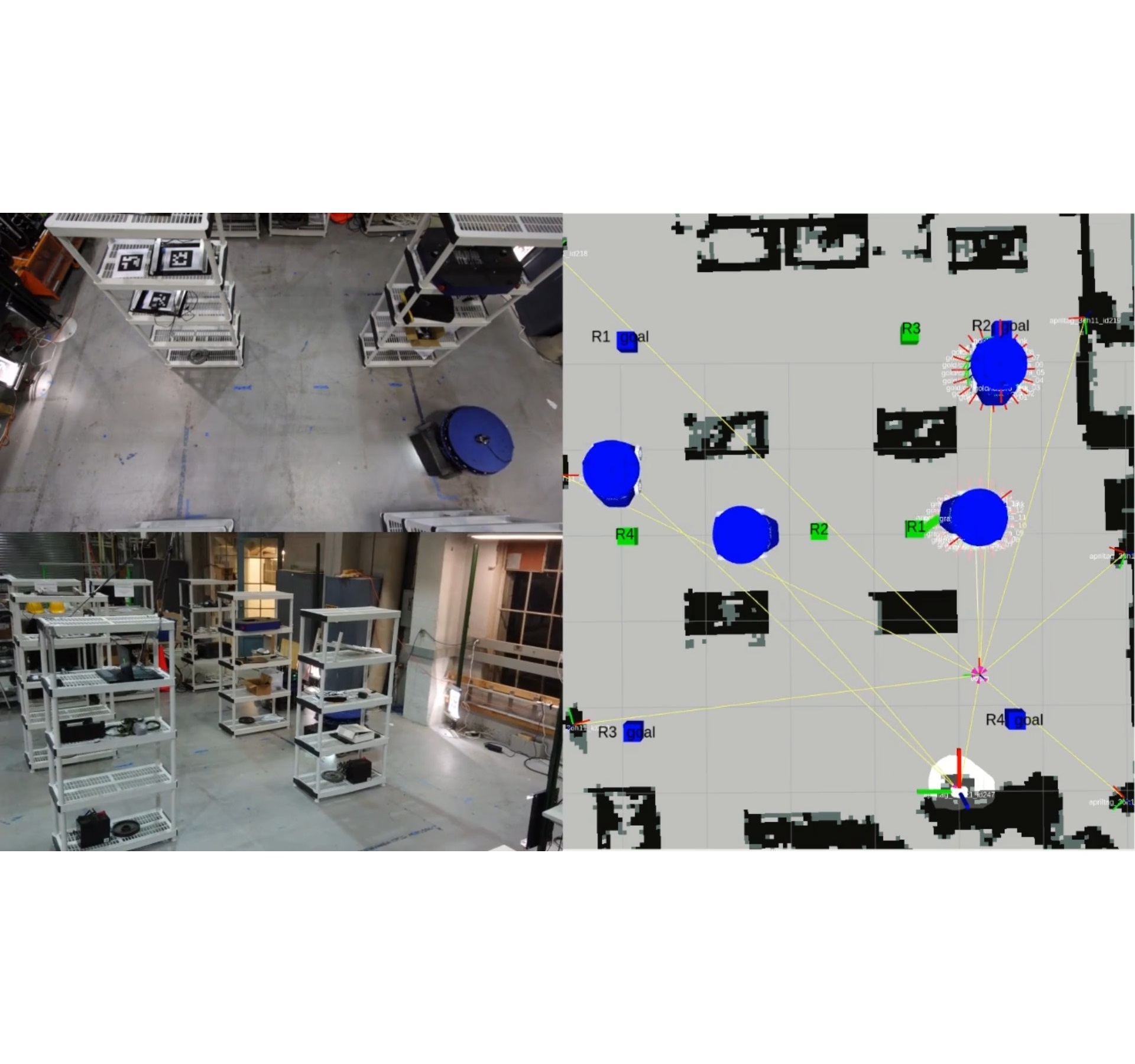
Multi-robot path planning in factory-like environments
Multi-agent path finding in complex environments, using either conventional decentralized planning or distributed-RL based approaches.
Heterogeneous multi-agent ergodic search
Multi-robot search of an area by a team of heterogeneous platforms, by leveraging the different capabilities of the robots.
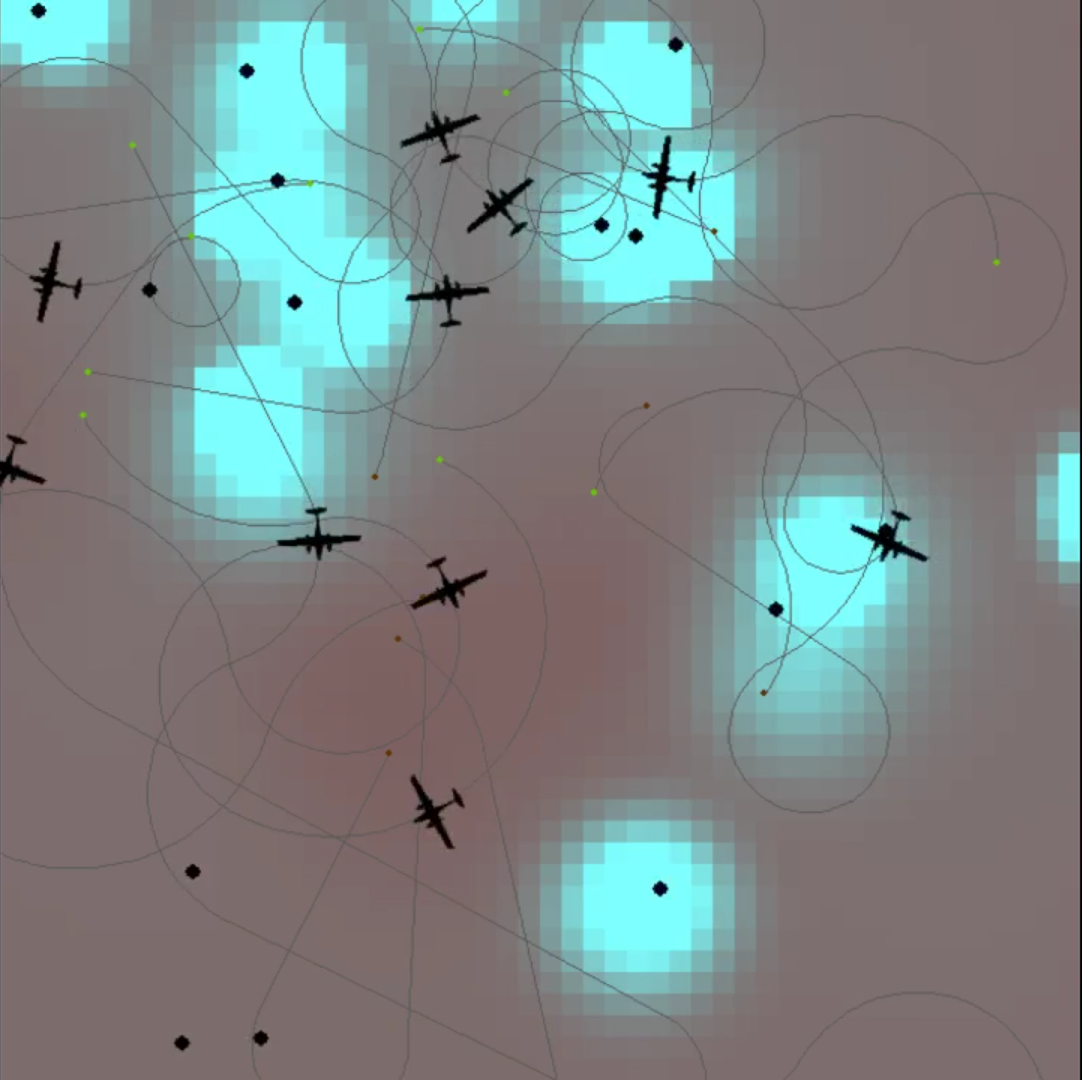
Distributed RL for Collaborative Policies
Let’s train multiple simple robots (green) to gather and assemble simple block elements (brown, obtained from pink sources) to build complex 3D structures!
Deep-RL for compliant control of a series-elastic snake robot
Training a snake robot to slither through unstructured environment, via distributed reinforcement learning.

Inertial-stabilized CPG for locomotion and climbing in rough terrain
Joint-Space Central Pattern Generator for the locomotion of a legged robot in challenging environments (stairs, steep inclines, unstructured terrain, etc.).