Past/Current Research Projects
Inertial-stabilized CPG with full SE(3) body pose control for locomotion, climbing, and payload balancing in extreme terrains
Joint-Space inertial CPG with full SE(3) body pose control for locomotion, climbing, and payload balancing on stairs, steep inclines, unstructured terrain, etc.
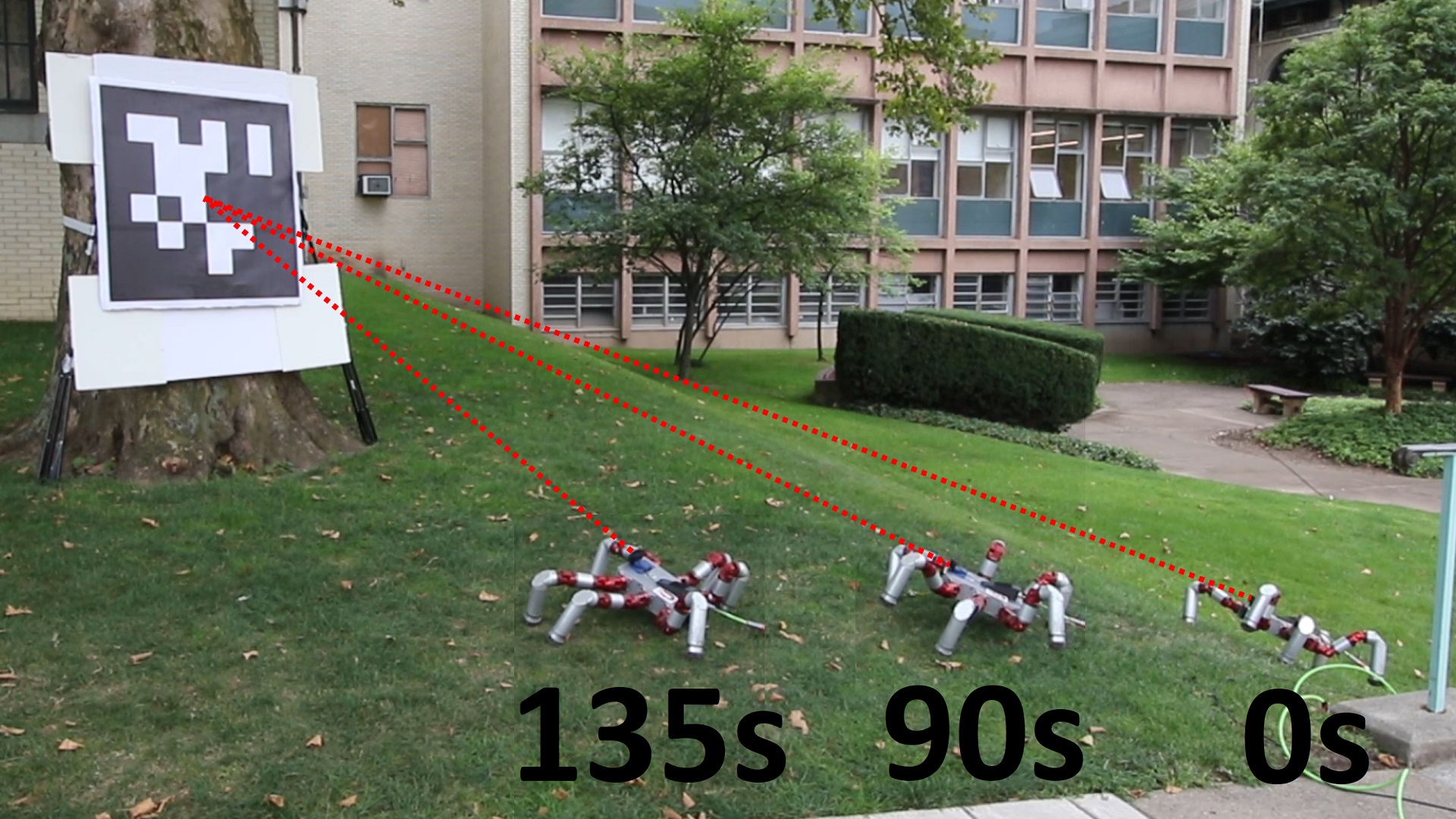
Task-space CPG for composed motions on a hexapod robot (and visual navigation)
Task-Space Central Pattern Generator for a legged robot (hexapod) locomoting while carrying a fixed camera, where gaze control and locomotion must be controlled independently.
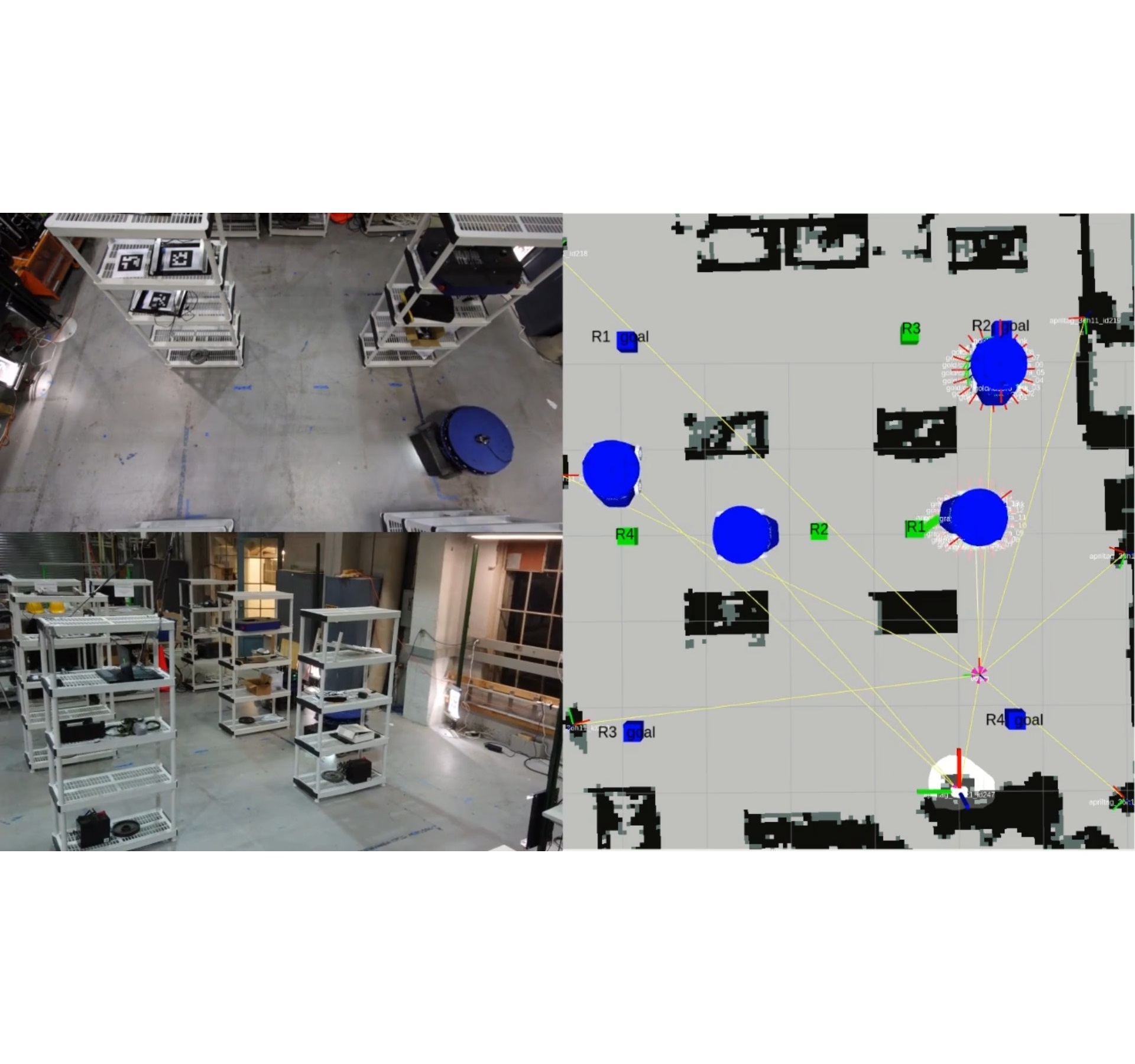
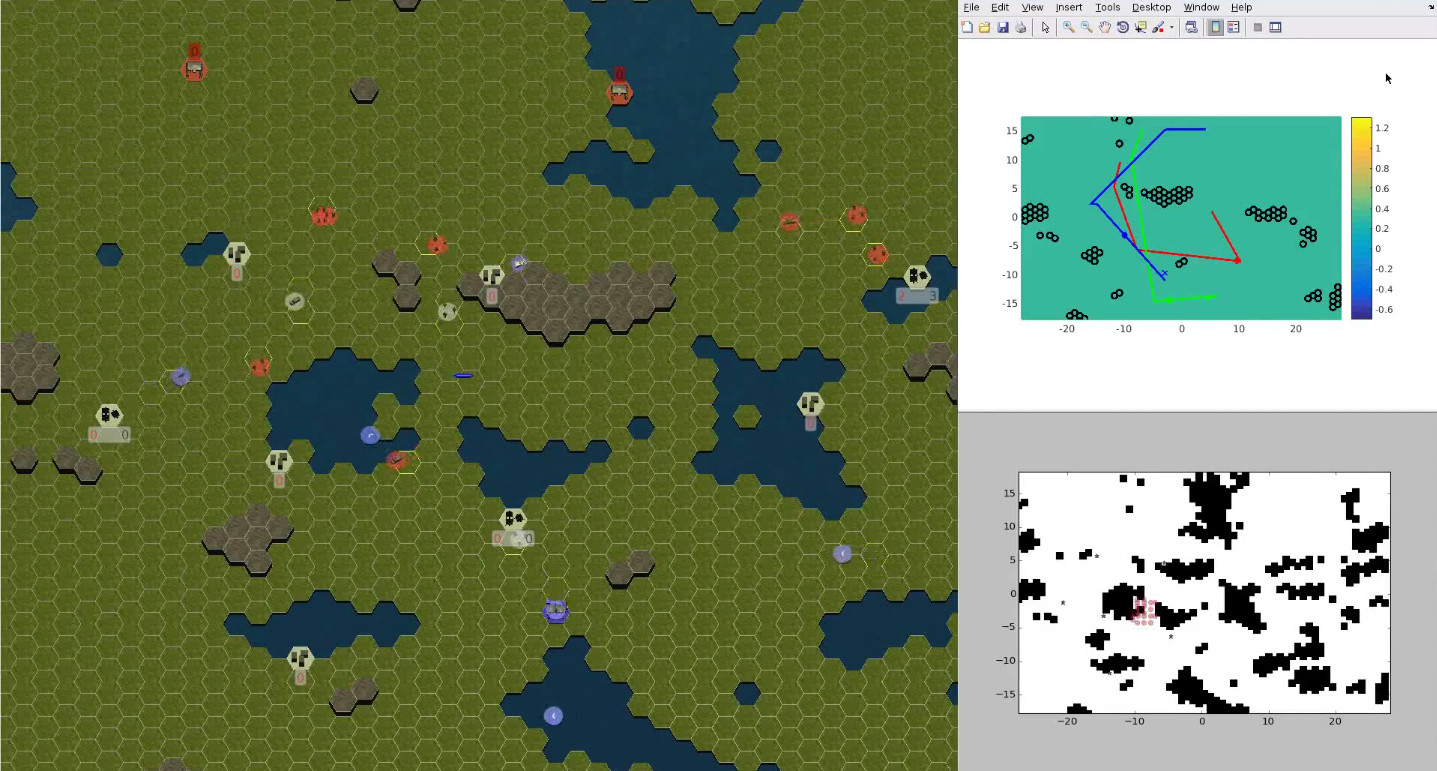
Multi-robot path planning in factory-like environments
Multi-agent path finding in complex environments, using either conventional decentralized planning or distributed-RL based approaches.
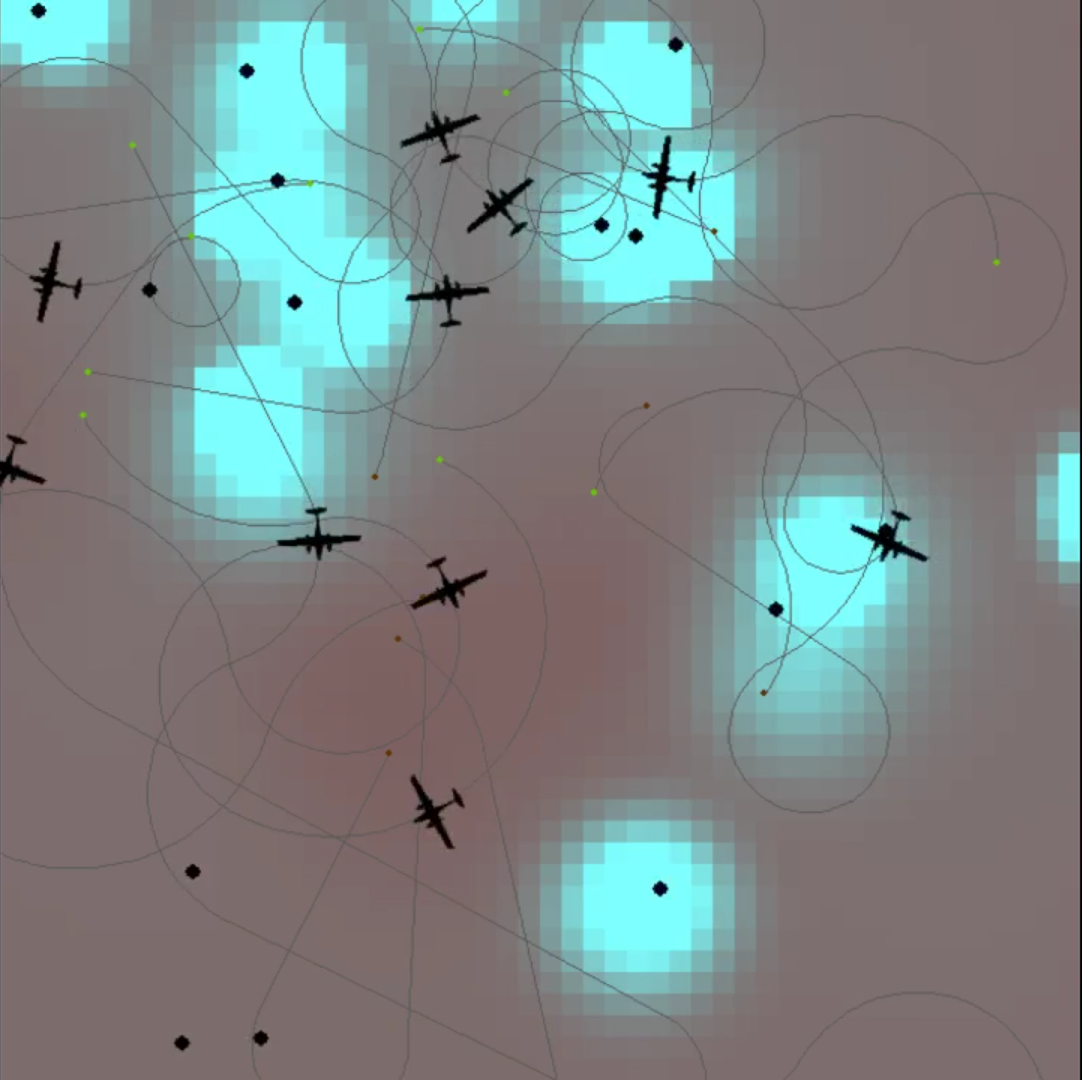
Heterogeneous multi-agent ergodic search
Multi-robot search of an area by a team of heterogeneous platforms, by leveraging the different capabilities of the robots.
Distributed RL for Collaborative Policies
Let’s train multiple simple robots (green) to gather and assemble simple block elements (brown, obtained from pink sources) to build complex 3D structures!
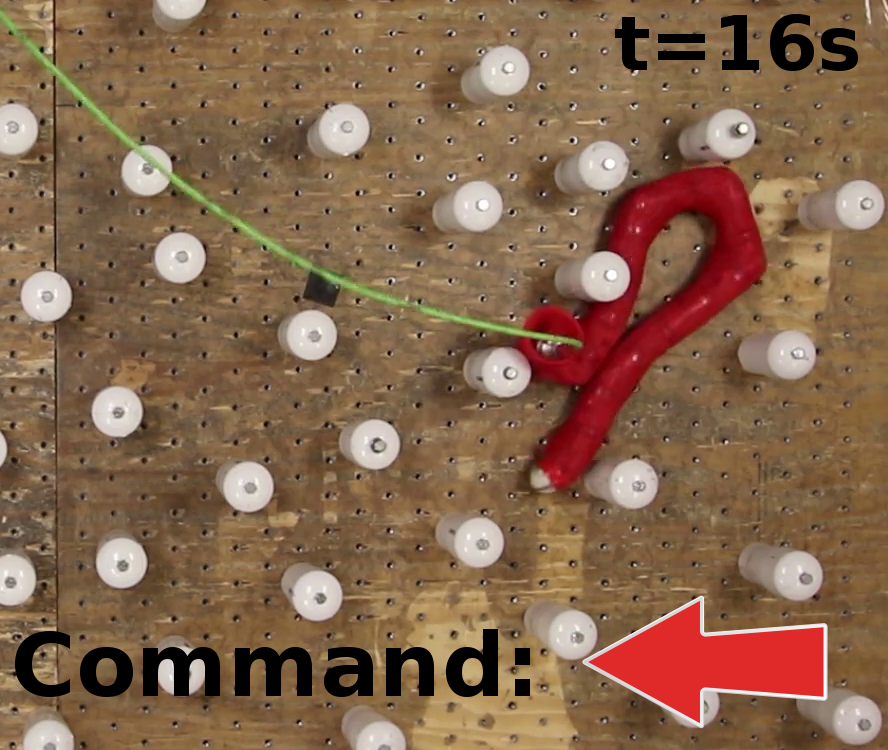
Deep-RL for compliant control of a series-elastic snake robot
Training a snake robot to slither through unstructured environment, via distributed reinforcement learning.

Inertial-stabilized CPG for locomotion and climbing in rough terrain
Joint-Space Central Pattern Generator for the locomotion of a legged robot in challenging environments (stairs, steep inclines, unstructured terrain, etc.).

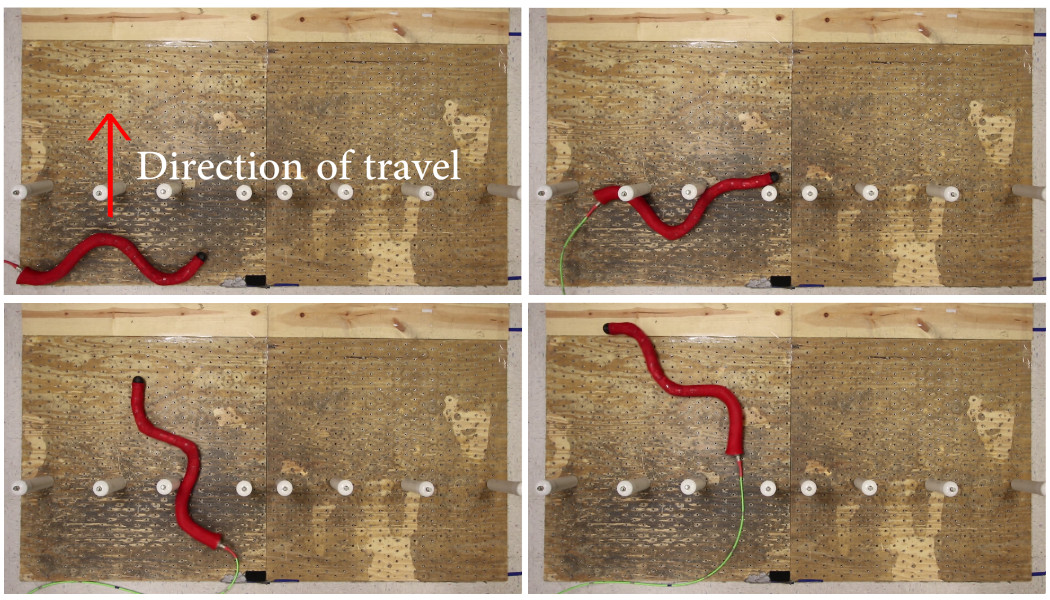
Proprioceptive-inertial control of a series-elastic snake robot during sidewinding
[Short description here]
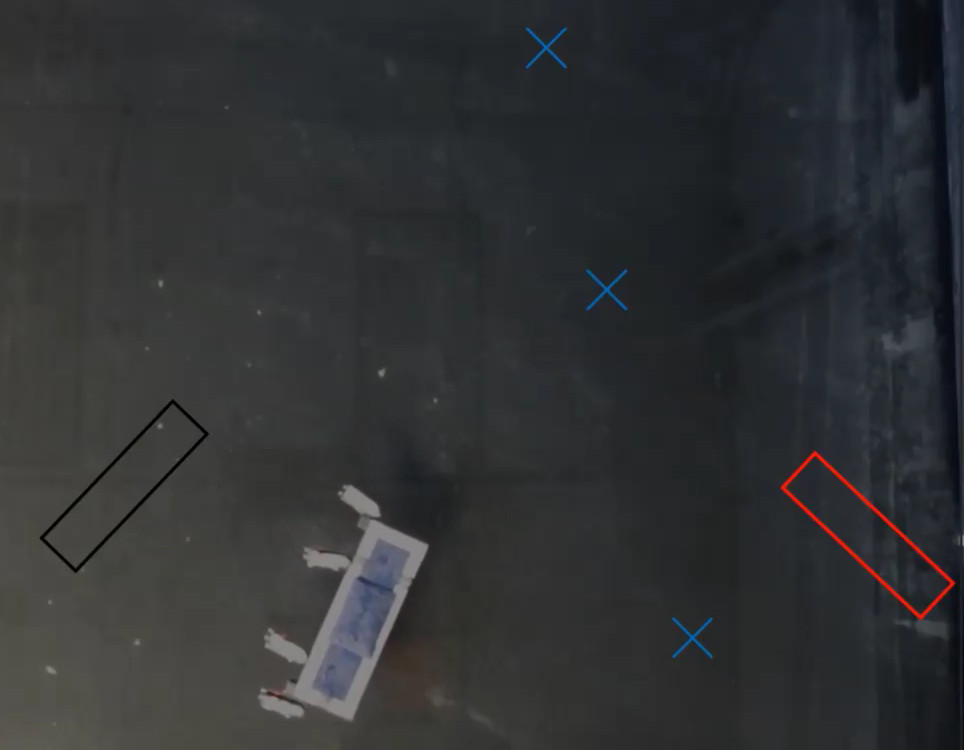

Self-selection of swarm trajectories for perimeter surveillance
[Short description here]